从零开始理解 Transformer —— 图解 Attention Is All You Need
一、引言:RNN 的困境与 Attention 的曙光
打开 Google Translate,输入 “I love you”,按一下回车,屏幕上跳出”我爱你”。这事儿看上去稀松平常,但你有没有想过,机器到底是怎么把这三个英文单词,一个一个地变成三个中文字的?
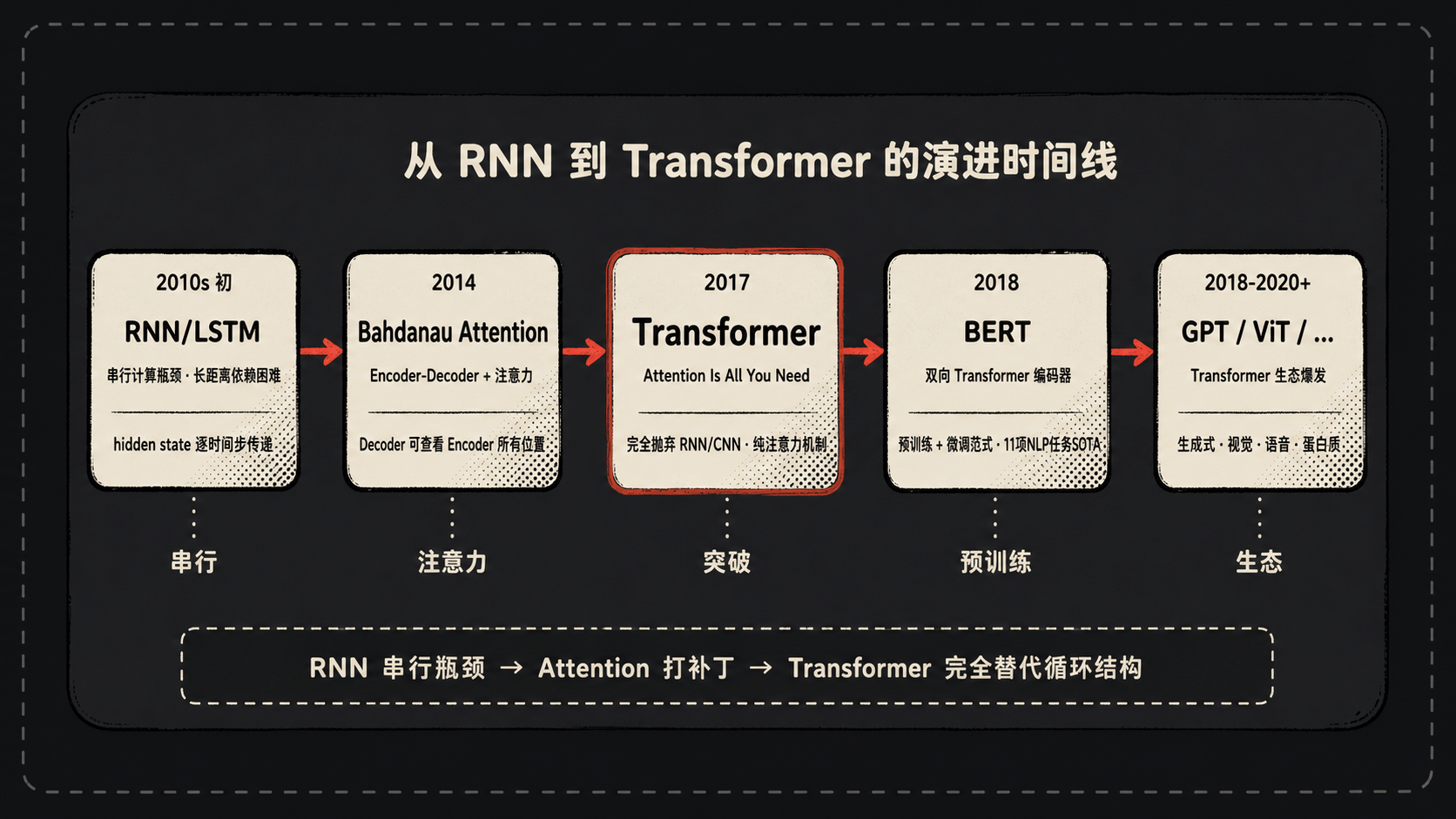
说实话,2017 年之前,这个问题的标准答案是 RNN(Recurrent Neural Network,循环神经网络:按顺序读入序列,并用隐藏状态记住前文),更精确点说,是 LSTM(Long Short-Term Memory,长短期记忆网络:给 RNN 加上门控记忆,尽量保留重要信息)或者 GRU(Gated Recurrent Unit,门控循环单元:更轻量的门控 RNN 变体)这一类带门控机制的模型。RNN 的工作方式特别像人在读书:从左往右一个词一个词地扫,每读一个词,就在脑子里更新一下”我目前理解到了什么”——这个”理解”在论文里叫 hidden state。读完最后一个词,把那个最终的 hidden state 当成整句话的”摘要”,扔给 Decoder 去翻译。
听上去挺合理对吧?但是这套机制有两个绕不开的死结。
第一个死结:不能并行。 你算 $t$ 时刻的 hidden state,必须先算完 $t-1$ 时刻的。一句话有 100 个词,你就得老老实实算 100 次,谁也插不了队。GPU 这种为并行而生的玩意儿,到这儿基本上就废了一半。
第二个死结:长距离依赖。 你想象一下,让你从左到右一字一句地读一篇 5000 字的小说,读到结尾让你回忆开头第一句话的精确措辞——基本上做不到。RNN 也一样,序列一长,最早的信息就被后来的信息一层一层地稀释掉了。LSTM 加了个”记忆门”,缓解了这个问题,但说真的,没根治。
2014 年,Bahdanau 等人提出了一个叫 Attention 的机制。这玩意儿的思路很妙:Decoder 在生成每个词的时候,不再只看那个被压缩了的”最终摘要”,而是回头去看一眼 Encoder 所有位置的 hidden state,按需取用。但 Attention 当时只是 RNN 的小弟,是给 RNN 打补丁的。
到了 2017 年,Google 那帮人——Vaswani 一伙——发了篇论文,标题叫 《Attention Is All You Need》。意思相当直白:RNN?不要了。卷积?也不要了。光用 Attention 就够了。
这个标题在当时看挺嚣张。八年过去了,回头看,人家有这个底气。
二、先导知识:Attention 到底是什么
在我们一头扎进 Transformer 之前,先把 Attention 这个东西掰扯清楚。
打个比方。你在淘宝搜”红色薄款羽绒服”。你输入的这串字就是 Query(查询)。淘宝拿你的 Query 去和数据库里成千上万件商品的标题、描述比对——这些标题描述就是 Key(键)。匹配度高的商品,连同它们的图片、价格、销量这些真正展示给你的内容——就是 Value(值)——排在最前面给你看。
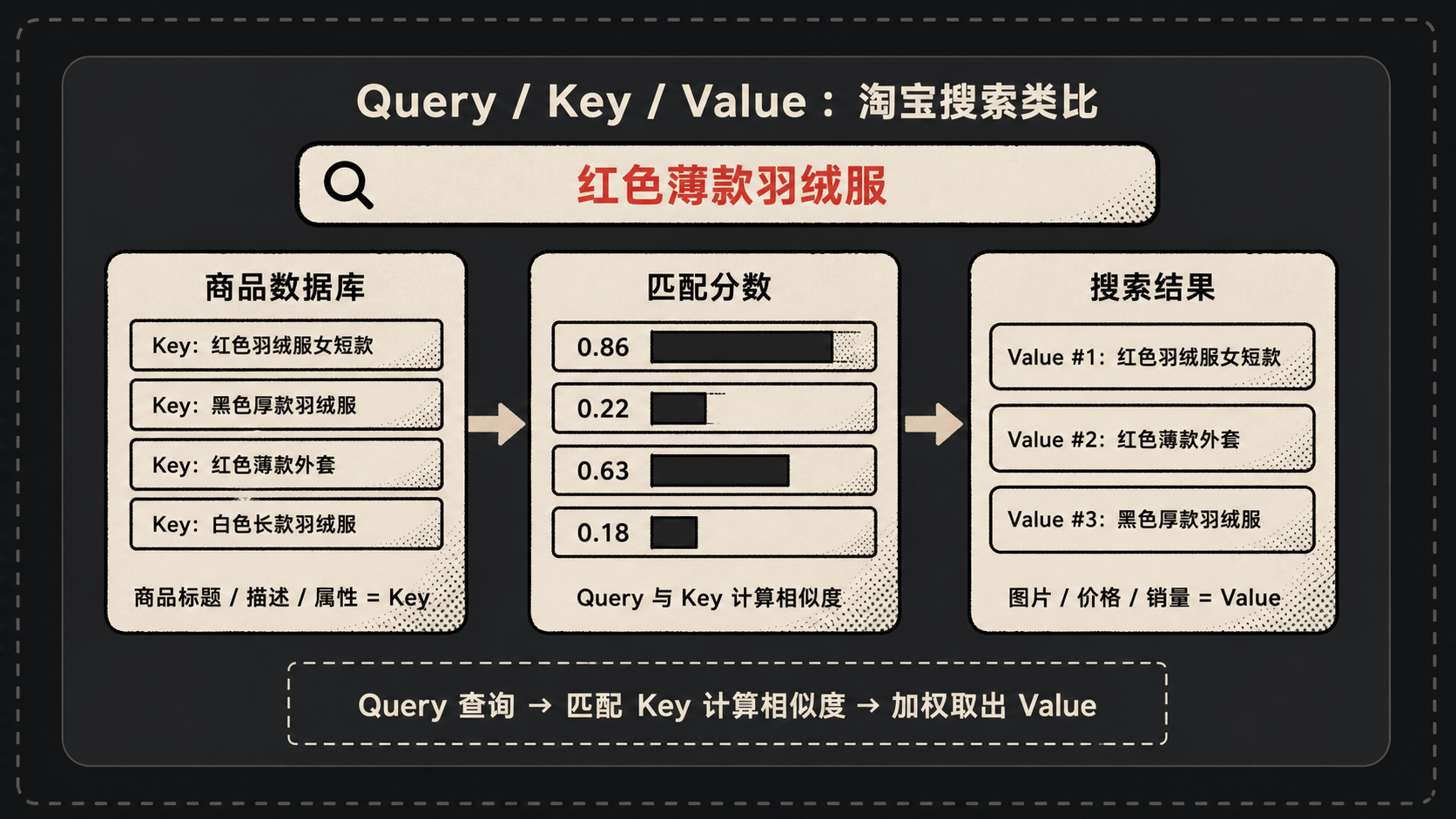
Attention 干的事就是这个:拿 Query 去和一堆 Key 比相似度,相似度作为权重,然后对对应的 Value 加权求和。
来,咱们一步一步看 Bahdanau 当年是怎么做的。假设 Encoder 已经把一句法语处理完了,得到 4 个 hidden state(咱们叫它 $h_1, h_2, h_3, h_4$,每个都是绿色小方块);Decoder 这边刚生成了一个 hidden state(红色小方块,叫 $s_t$),现在要生成下一个词。
- 计算 $s_t$ 和每个 $h_i$ 的相似度(最简单的方式就是点积),得到 4 个 score:$e_1, e_2, e_3, e_4$。
- 对这 4 个 score 做 softmax,归一化成权重 $\alpha_1, \alpha_2, \alpha_3, \alpha_4$,加起来等于 1。
- 用这 4 个权重对 $h_1, h_2, h_3, h_4$ 加权求和,得到 context vector $c_t = \sum_i \alpha_i h_i$。
- 把 $c_t$ 和 $s_t$ 拼起来喂给 Decoder,生成下一个词。
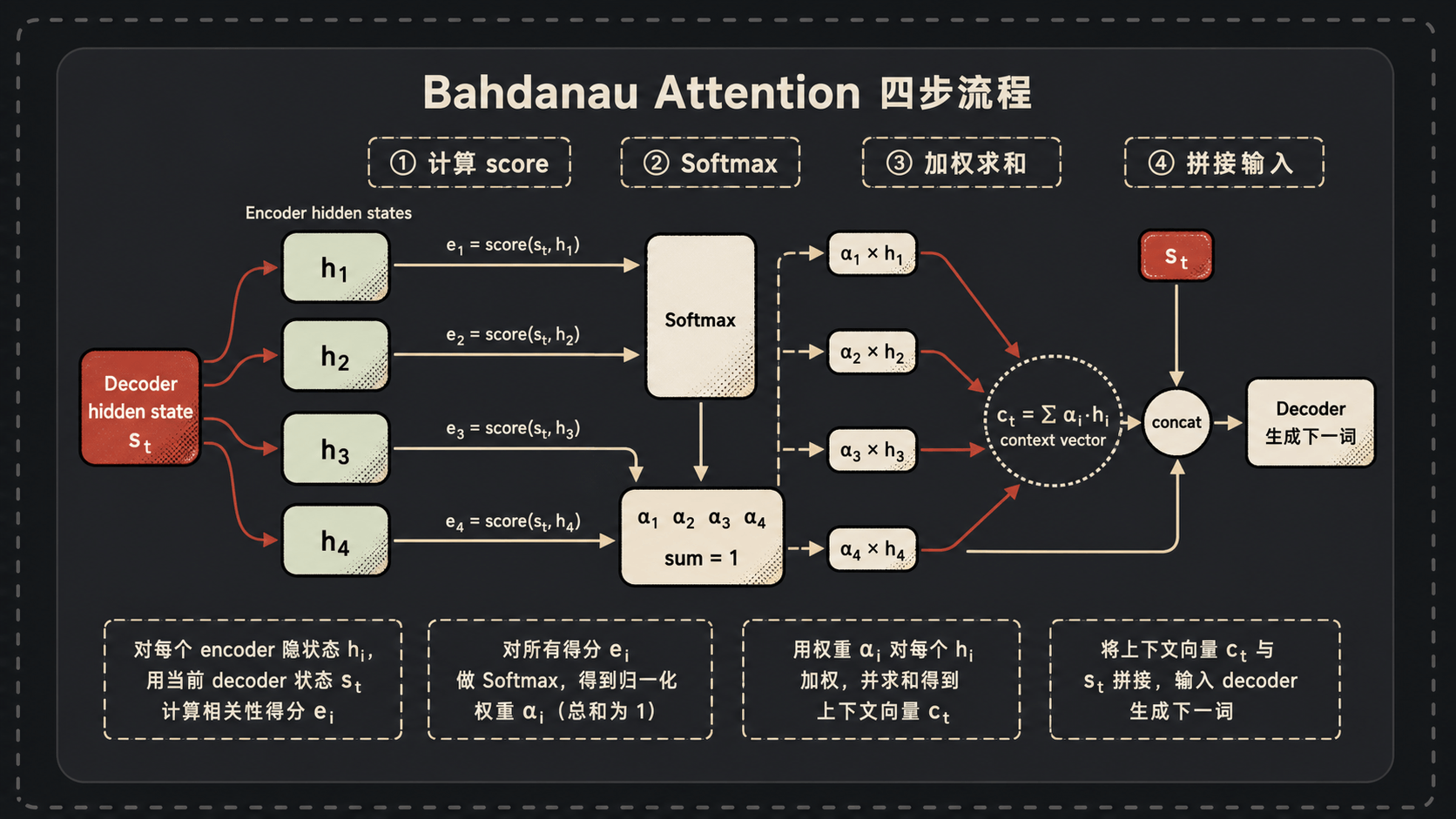
这套东西就叫 Bahdanau Attention(也叫 Additive Attention,因为他原版用的是 tanh 加法而不是点积,不过本质思想一样)。它确实把 RNN 的长距离依赖问题缓解了——Decoder 想看哪个位置就看哪个位置,不用等信息一层层传过来。
但它有个根本问题没解决:Encoder 那边还是 RNN,还是得串行算。
于是 Transformer 站起来说:那干脆把 RNN 整个扔掉,连 Encoder 内部我都用 Attention 来算,行不行?
事实证明,行。而且行得不能更行。
三、Transformer 全景图
在深入细节之前,咱们先看一眼整体长什么样。
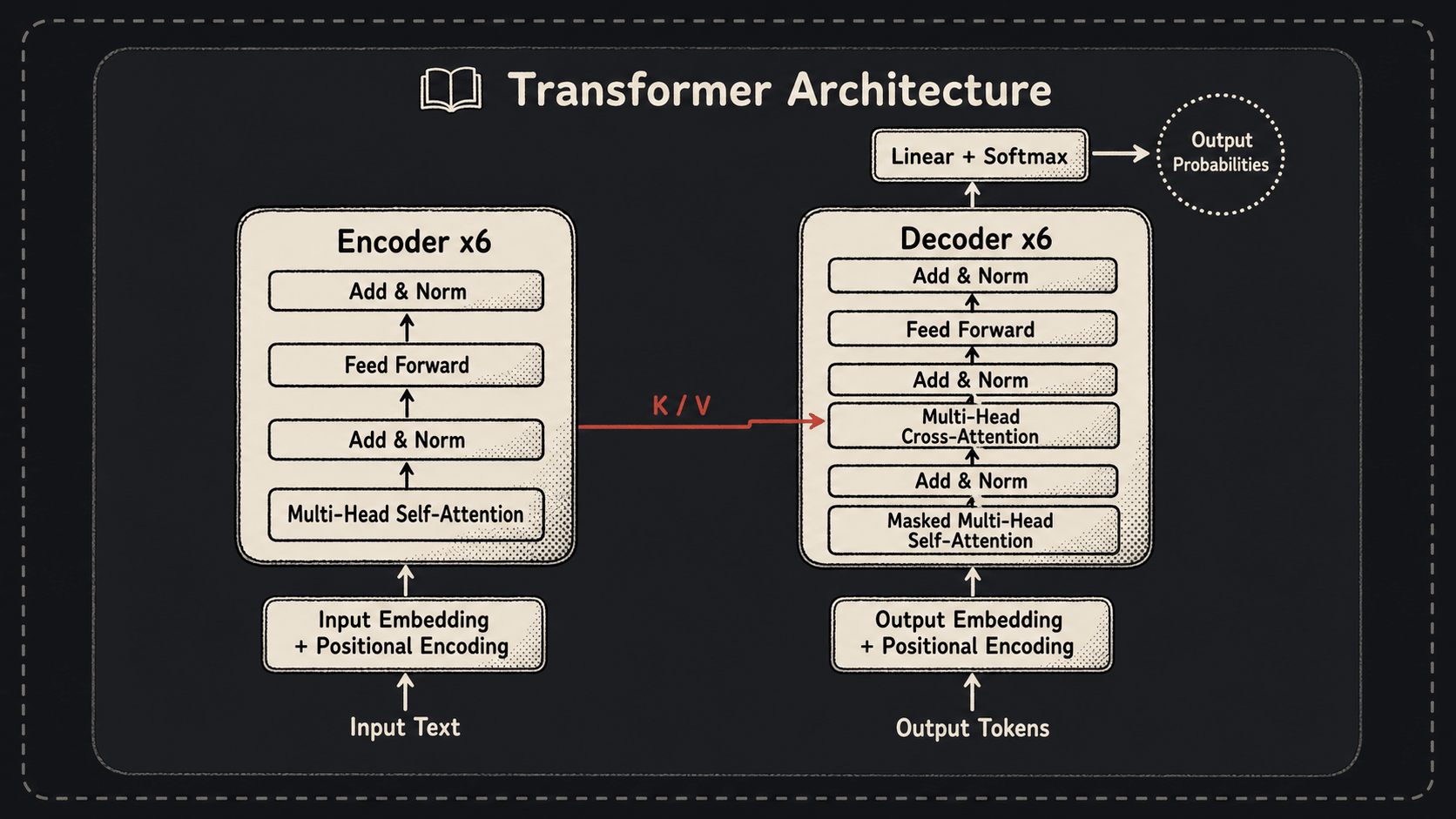
Transformer 长成左右对称的样子。左半是 Encoder(编码器),负责理解输入;右半是 Decoder(解码器),负责生成输出。
Encoder 由 6 个一模一样的层堆叠而成(论文里 N=6,没什么神秘理由,就是实验出来的)。每一层里头有两个子模块:
- Multi-Head Self-Attention——多头自注意力
- Position-wise Feed-Forward Network——逐位置前馈网络
每个子模块外面都套了一层 残差连接 + Layer Normalization(也就是 Add & Norm)。
Decoder 也是 6 层堆叠,但每一层比 Encoder 多一个子模块,所以总共三个:
- Masked Multi-Head Self-Attention——带掩码的自注意力(防止偷看答案)
- Encoder-Decoder Attention(也叫 Cross-Attention)——拿 Encoder 的输出当 K 和 V
- Feed-Forward Network——和 Encoder 一样
所有子模块的输出维度都统一为 $d_{model} = 512$,这是为了让残差连接能直接相加。
数据流是这样的:
输入句子 → Input Embedding + Positional Encoding → Encoder × 6 → 输出送进 Decoder 做 Cross-Attention → Decoder × 6 → Linear + Softmax → 输出每个位置的词的概率分布
下面咱们就把里面的每个零件挨个拆开看。
四、Self-Attention 深度拆解
这是 Transformer 的灵魂。把这部分搞明白了,剩下的都是装饰。
Q、K、V 是怎么变出来的
输入是一句话,假设有 $n$ 个词。每个词先被映射成一个 $d_{model}$ 维的向量(这就是 word embedding),整句话拼起来是一个 $(n, d_{model})$ 的矩阵,咱们叫它 $X$。
接下来三个魔法矩阵登场:$W^Q$、$W^K$、$W^V$,每个都是 $(d_{model}, d_k)$ 的形状,参数是模型学出来的。
\[Q = XW^Q,\quad K = XW^K,\quad V = XW^V\]这样我们就拿到了 $Q$、$K$、$V$ 三个矩阵,形状都是 $(n, d_k)$。
注意一个反直觉的地方:在 Self-Attention 里,Q、K、V 都是从同一个输入 $X$ 算出来的。同一个句子,自己跟自己玩。这就是”Self”的意思。
论文里 $d_{model}=512$,$d_k=d_v=64$。为啥 $d_k$ 比 $d_{model}$ 小?因为后面要分 8 个头,512/8=64。咱们放到下一节再讲。
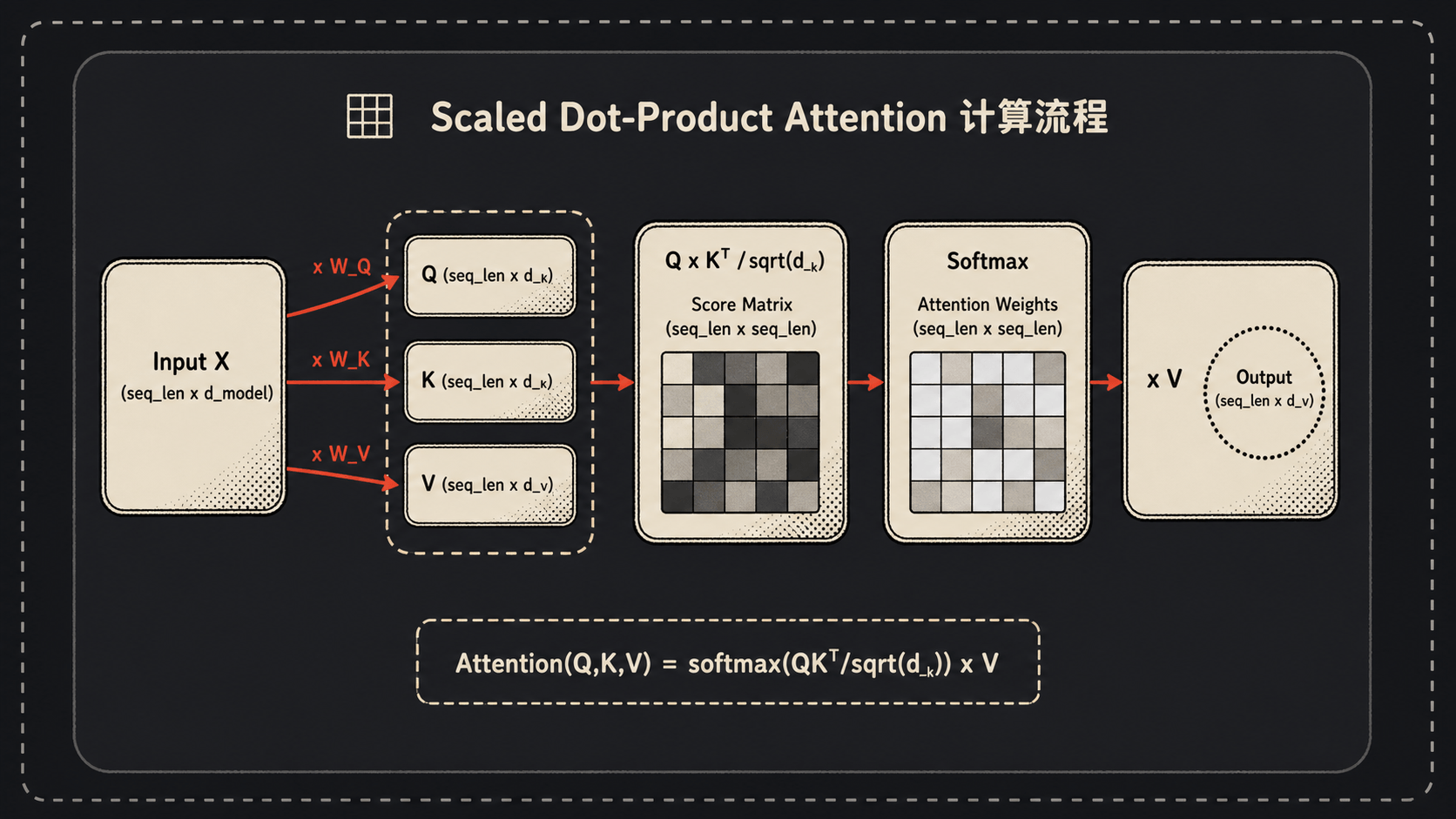
Scaled Dot-Product Attention 公式
来,请出这篇论文最有名的一行公式:
\[\operatorname{Attention}(Q,K,V) = \operatorname{softmax}\left(\frac{QK^\top}{\sqrt{d_k}}\right)V\]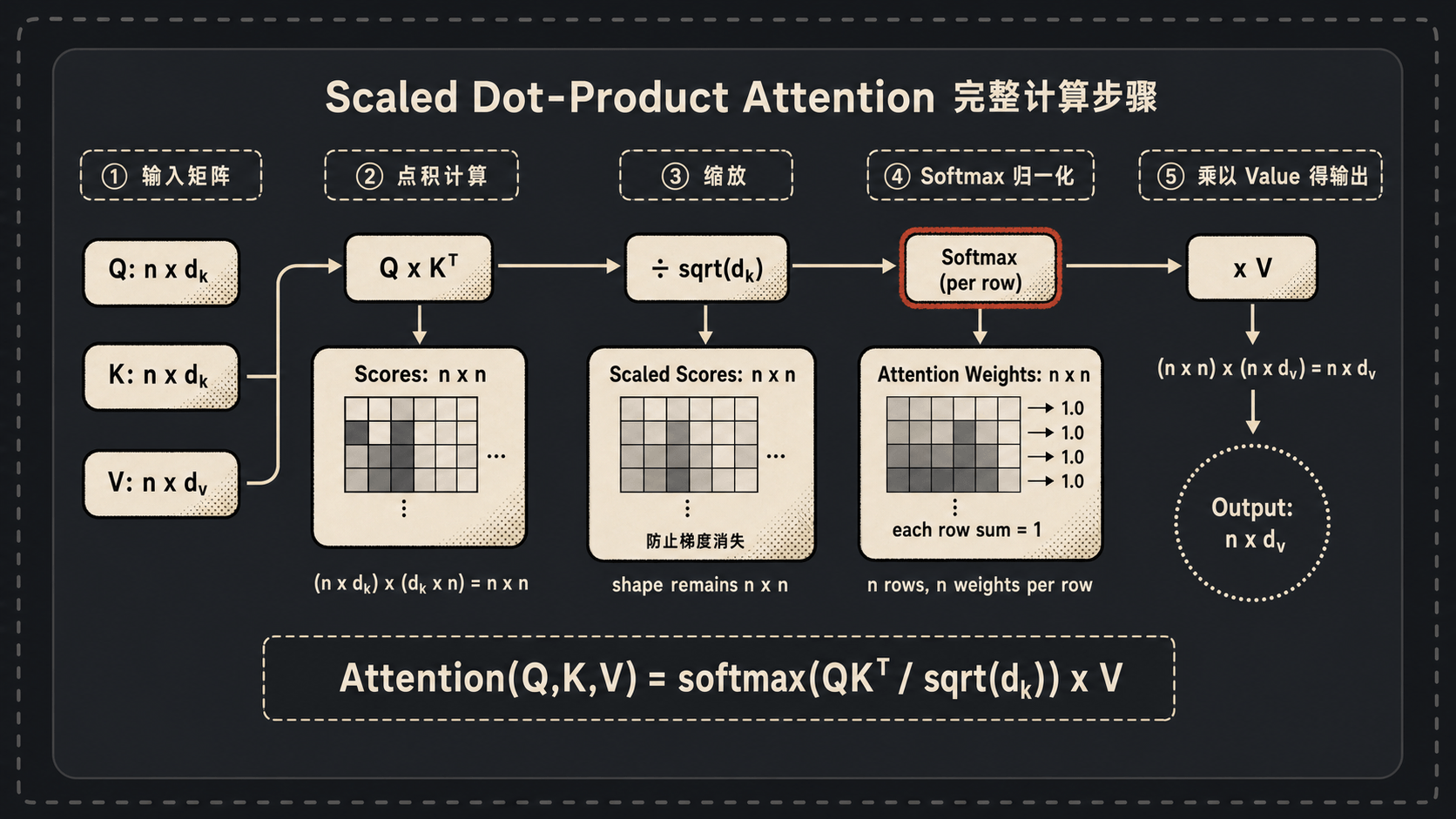
这玩意儿看着唬人,咱们一步一步拆。
第一步:$QK^\top$
$Q$ 是 $(n, d_k)$,$K^\top$ 是 $(d_k, n)$,乘起来是 $(n, n)$。这个 $n \times n$ 的矩阵很有意思:第 $i$ 行第 $j$ 列的元素,就是第 $i$ 个词的 Query 和第 $j$ 个词的 Key 的点积——也就是”第 $i$ 个词对第 $j$ 个词的注意力分数”。
第二步:除以 $\sqrt{d_k}$
为什么要除?论文解释是:当 $d_k$ 比较大时,$QK^\top$ 的值会变得很大,导致 softmax 落入梯度极小的区域(softmax 在输入差距很大时会几乎变成 one-hot,梯度趋近于 0)。
数学上的原因:假设 $Q$ 和 $K$ 的每个分量都是独立的、均值为 0 方差为 1 的随机变量,那么它们点积 $\sum_{i=1}^{d_k} q_i k_i$ 的方差就是 $d_k$。除以 $\sqrt{d_k}$ 把方差压回 1,让 softmax 工作在它擅长的区域。
这个细节看似不起眼,但去掉它训练就不稳定。深度学习里很多看似边边角角的 trick,其实都是踩过坑总结出来的。
第三步:softmax
沿着最后一个维度(每一行)做 softmax,让每一行的权重加起来等于 1。这样我们就得到了一个真正的”注意力权重矩阵”。
第四步:乘以 $V$
权重矩阵是 $(n, n)$,$V$ 是 $(n, d_k)$,乘起来是 $(n, d_k)$。物理意义是:每个位置的输出,都是用注意力权重对所有位置的 $V$ 做加权求和。
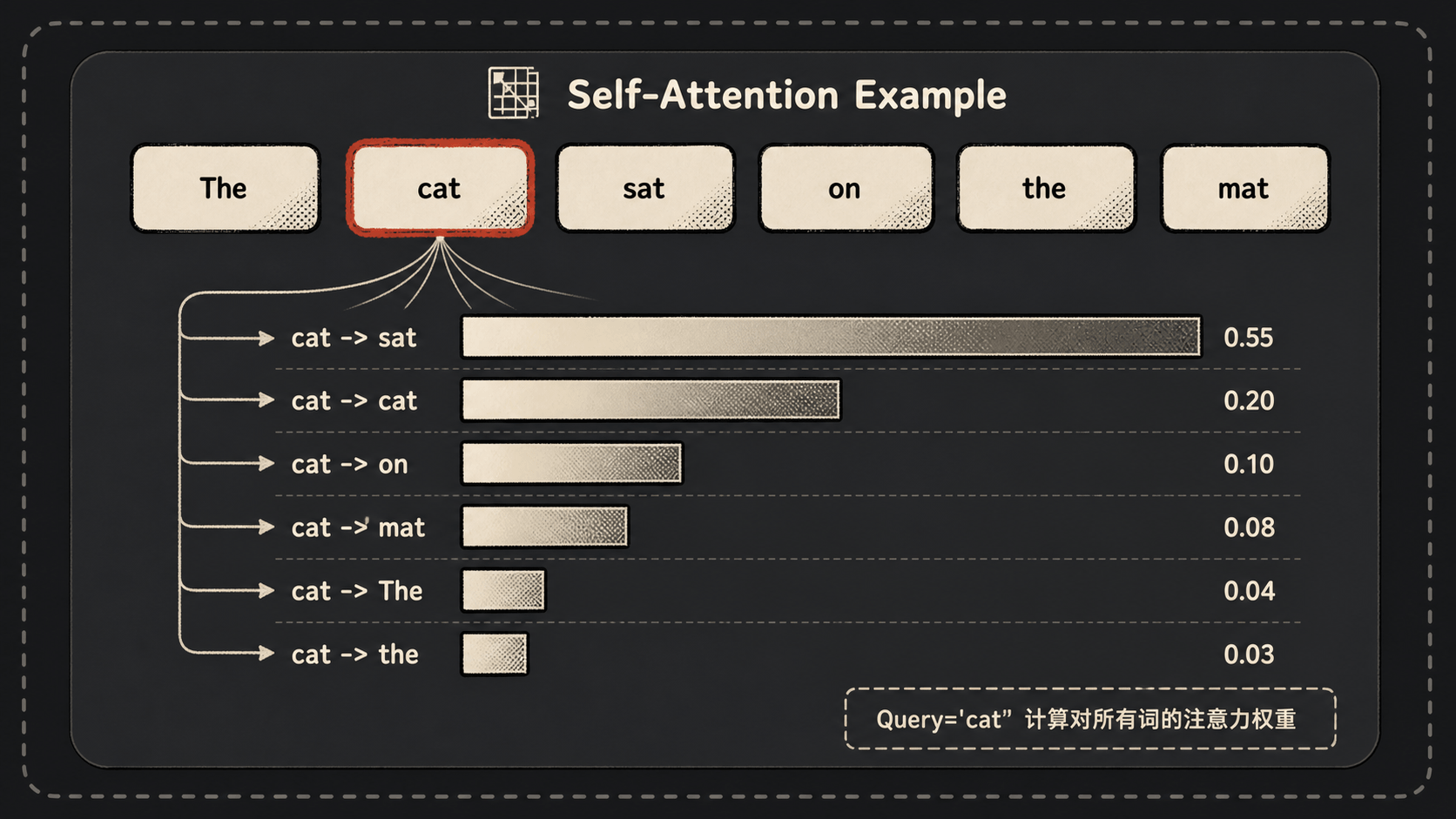
举个具体的句子帮你脑补一下。”The cat sat on the mat” 这句话,当模型处理 “cat” 这个词的时候,它的 Query 会和句子里每个词(包括它自己)的 Key 比对:
- 跟 “sat” 比,发现”动作和发出动作的主体”关系紧密 → 权重高
- 跟 “the” 比,发现这就是个冠词没啥信息 → 权重低
- 跟 “mat” 比,发现”猫坐在垫子上”也是相关的 → 权重中等
最后 “cat” 这个位置的输出,就是用这些权重去加权混合所有词的 $V$ 向量。说白了,每个词都用自己的视角,把整句话重新”读”了一遍,输出一个融合了上下文信息的新表示。
给一个小到能心算的例子
假设 $d_k=3$,句子就两个词。$Q$、$K$、$V$ 都是 $(2, 3)$:
\[Q = \begin{bmatrix} 1 & 0 & 1 \\ 0 & 1 & 1 \end{bmatrix}, \quad K = \begin{bmatrix} 1 & 1 & 0 \\ 0 & 1 & 1 \end{bmatrix}, \quad V = \begin{bmatrix} 1 & 2 \\ 3 & 4 \end{bmatrix}\](V 故意设成 2 维,方便看输出。)
\[QK^\top = \begin{bmatrix} 1 & 1 \\ 1 & 2 \end{bmatrix}\]除以 $\sqrt{3} \approx 1.73$:
\[\begin{bmatrix} 0.58 & 0.58 \\ 0.58 & 1.15 \end{bmatrix}\]每行 softmax:
\[\begin{bmatrix} 0.5 & 0.5 \\ 0.36 & 0.64 \end{bmatrix}\]乘以 $V$:
\[\begin{aligned} &\begin{bmatrix} 0.5 \cdot 1 + 0.5 \cdot 3 & 0.5 \cdot 2 + 0.5 \cdot 4 \\ 0.36 \cdot 1 + 0.64 \cdot 3 & 0.36 \cdot 2 + 0.64 \cdot 4 \end{bmatrix} \\ &= \begin{bmatrix} 2.0 & 3.0 \\ 2.28 & 3.28 \end{bmatrix} \end{aligned}\]输出还是 $(2, 2)$。第一个词的输出是两个 $V$ 的等权平均,第二个词的输出更偏向于第二行的 $V$。
NumPy 实现
代码胜过千言万语,下面是 Scaled Dot-Product Attention 的 NumPy 实现,扔进 Jupyter 就能跑:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
import numpy as np
def softmax(x, axis=-1):
x = x - np.max(x, axis=axis, keepdims=True)
exp_x = np.exp(x)
return exp_x / np.sum(exp_x, axis=axis, keepdims=True)
def scaled_dot_product_attention(Q, K, V, mask=None):
d_k = Q.shape[-1]
scores = np.matmul(Q, K.swapaxes(-1, -2)) / np.sqrt(d_k)
if mask is not None:
scores = np.where(mask == 0, -1e9, scores)
attention_weights = softmax(scores, axis=-1)
output = np.matmul(attention_weights, V)
return output, attention_weights
整个 Self-Attention 的核心就这么短。一个矩阵乘、一个除法、一个 softmax、再一个矩阵乘。所有 Transformer 神乎其神的能力,本质上都是这几行代码堆起来的。
五、Multi-Head Attention:八个脑袋一起看
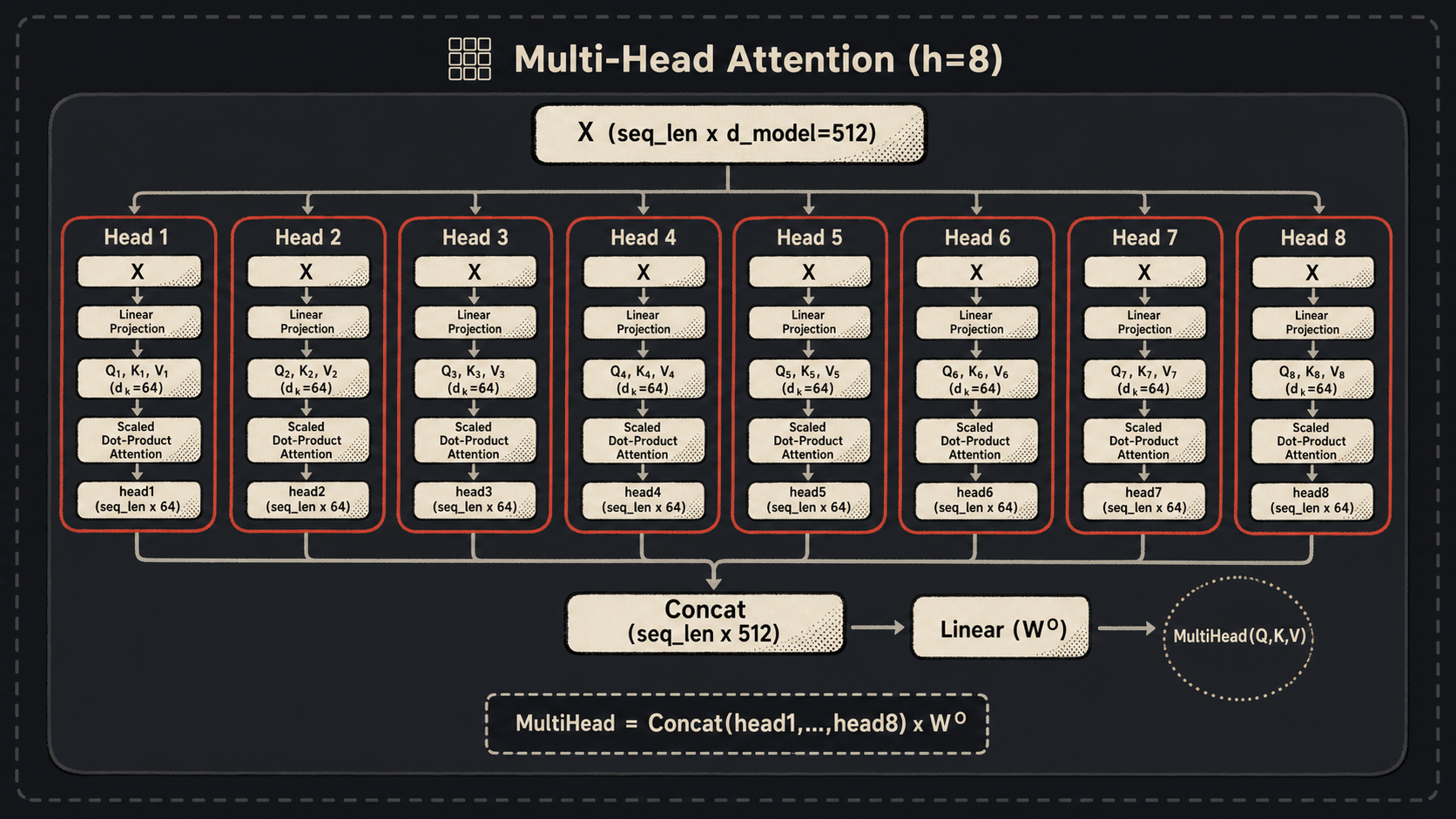
单头 Self-Attention 已经很强了,但论文还嫌不够,整出个 Multi-Head Attention。
为啥需要多头?论文原话是:”allows the model to jointly attend to information from different representation subspaces at different positions.”
翻译成人话:一个头可能擅长捕捉”主语-谓语”关系,另一个头可能擅长抓”形容词-名词”关系,第三个头可能在意位置远近,第四个头说不定在琢磨语义相似性……每个头是一个独立的”视角”,组合起来对句子的理解就更立体。
具体怎么搞?说出来你可能要笑——并不是真的复制 8 套权重去算 8 遍。论文是这么干的:把 $d_{model}=512$ 维切成 8 份,每份 $d_k=d_v=64$ 维。每个头独立地做一次 Scaled Dot-Product Attention,得到一个 $(n, 64)$ 的输出。8 个头的输出 concat 起来又变回 $(n, 512)$,最后过一个线性变换 $W^O$:
\[\operatorname{MultiHead}(Q,K,V) = \operatorname{Concat}(\operatorname{head}_1,\dots,\operatorname{head}_h)W^O\] \[\operatorname{head}_i = \operatorname{Attention}(QW_i^Q, KW_i^K, VW_i^V)\]也就是说每个头都有自己的一套 $W_i^Q, W_i^K, W_i^V$(形状都是 $(d_{model}, d_k)$,不再是 $(d_{model}, d_{model})$)。
这么做的好处是:计算量和单头全维 attention 差不多——因为总维度不变,只是分到了不同的子空间里。但表达能力上多了”多视角”的好处。
论文用了 $h=8$ 个头。后面 BERT-base 也是 12 头,BERT-large 是 16 头,反正基本都遵循这个套路。
简单的 NumPy 多头实现:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
def multi_head_attention(X, W_Q, W_K, W_V, W_O, num_heads):
n, d_model = X.shape
d_k = d_model // num_heads
Q = X @ W_Q
K = X @ W_K
V = X @ W_V
# 切成 num_heads 个头:(n, d_model) -> (num_heads, n, d_k)
Q = Q.reshape(n, num_heads, d_k).transpose(1, 0, 2)
K = K.reshape(n, num_heads, d_k).transpose(1, 0, 2)
V = V.reshape(n, num_heads, d_k).transpose(1, 0, 2)
out, _ = scaled_dot_product_attention(Q, K, V)
# 拼回去
out = out.transpose(1, 0, 2).reshape(n, d_model)
return out @ W_O
六、位置编码:告诉 Transformer 词在哪儿
讲到这儿有个很麻烦的问题,咱们得直面:
Transformer 根本不知道词的顺序。
RNN 是一个一个词读的,天然有顺序信息。CNN 有局部感受野,也算一种位置信息。但 Self-Attention 看到的是一锅”集合”——你把 “I love you” 打乱成 “you I love”,Self-Attention 算出来的输出顺序虽然变了,但每个词的表示是一模一样的(只是位置换了下)。
说白了,纯 Transformer 就是个高级版的词袋模型。这显然不行——”我爱你”和”你爱我”差远了。
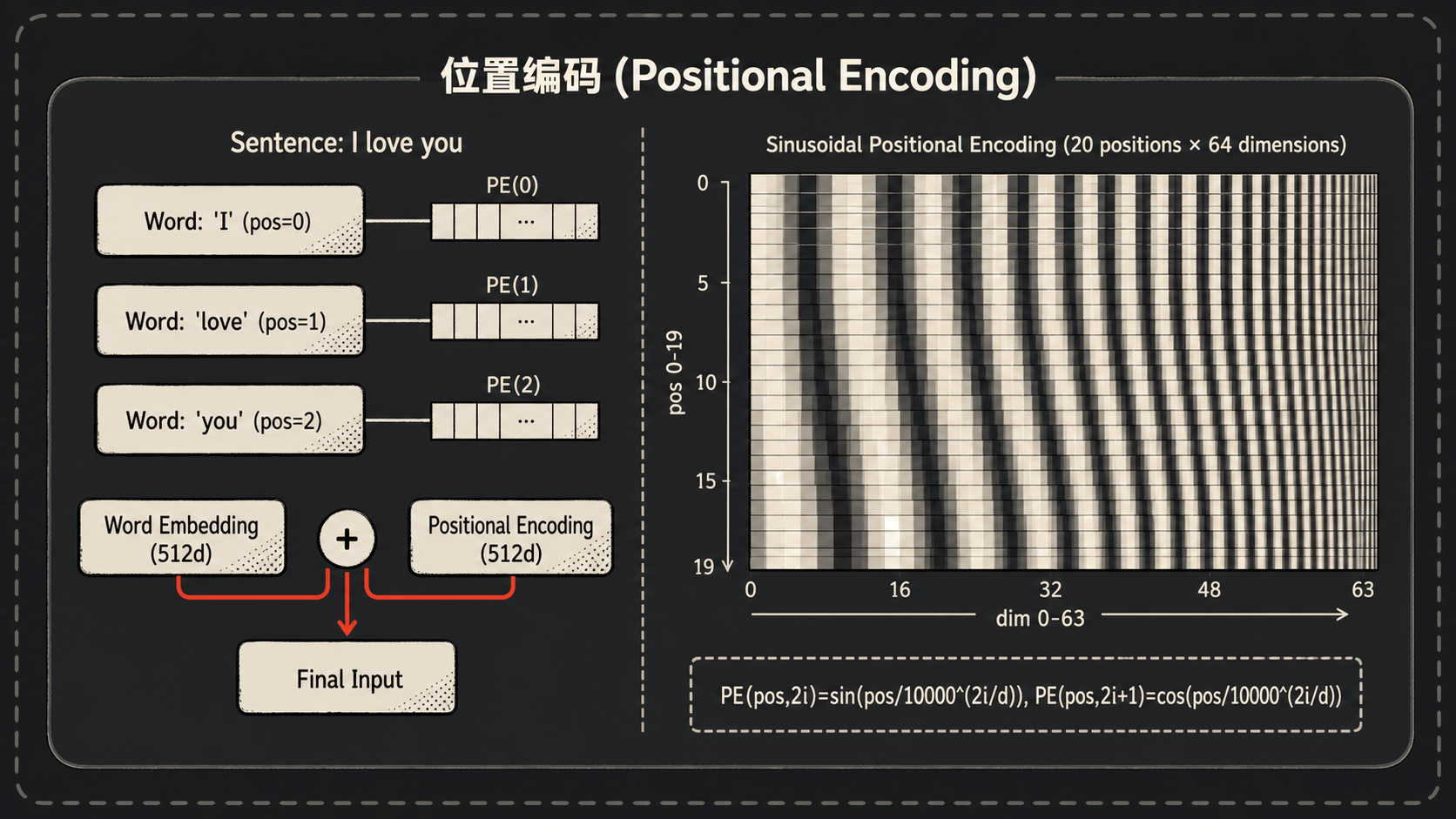
怎么办?论文的方案叫 Positional Encoding(位置编码):在 Input Embedding 上面直接加一个表示位置的向量。
\[\operatorname{final\_input} = \operatorname{word\_embedding} + \operatorname{position\_encoding}\]注意是相加,不是拼接。这样维度还是 $d_{model}$,不会变胖。
论文选了一个很妙的方式——用 sin/cos 函数:
\[PE(pos,2i) = \sin\left(\frac{pos}{10000^{2i/d_{model}}}\right)\] \[PE(pos,2i+1) = \cos\left(\frac{pos}{10000^{2i/d_{model}}}\right)\]其中 $pos$ 是词的位置(0, 1, 2, …),$i$ 是维度索引(对 $d_{model}=512$,$i$ 从 0 到 255)。偶数维用 sin,奇数维用 cos。
为什么是 sin/cos 而不是直接让模型学一组位置 embedding?两个好处:
- 可以外推到更长的序列。 训练时最长见过 100 个词,推理时来了 200 个词的句子,sin/cos 公式直接能给出答案;而 learned embedding 没见过的位置就抓瞎了。
- 天然编码相对位置。 sin/cos 有个优雅的数学性质:$PE(pos+k)$ 可以被表示为 $PE(pos)$ 的一个线性变换(不依赖于 $pos$,只依赖于 $k$)。这意味着模型可以很容易学到”相对距离 $k$”这种概念。
实现起来也很简单:
1
2
3
4
5
6
7
8
9
def positional_encoding(seq_len, d_model):
pos = np.arange(seq_len)[:, np.newaxis] # (seq_len, 1)
i = np.arange(d_model)[np.newaxis, :] # (1, d_model)
angle_rates = 1 / np.power(10000, (2 * (i // 2)) / d_model)
angle_rads = pos * angle_rates # (seq_len, d_model)
pe = np.zeros_like(angle_rads)
pe[:, 0::2] = np.sin(angle_rads[:, 0::2])
pe[:, 1::2] = np.cos(angle_rads[:, 1::2])
return pe
后来很多模型(比如 BERT、GPT)改用了 learned positional embedding,简单粗暴效果也不错。再后来又有了 RoPE(旋转位置编码)、ALiBi 这些更花哨的方案。但原版论文的 sinusoidal PE 至今仍然是个理解 Transformer 不可绕过的基本盘。
七、残差连接与 Layer Normalization
每个子层外面都包着这么一层:
\[\operatorname{output} = \operatorname{LayerNorm}(x + \operatorname{Sublayer}(x))\]Sublayer(x) 就是 Attention 或者 FFN。这两个零件——残差连接和 Layer Norm——单拎出来都挺简单,但缺一不可。
残差连接:让深层网络能训得动
残差连接(Residual Connection)这个想法来自 2015 年的 ResNet。原理就一句话:把输入直接加到输出上。
听上去没啥技术含量,但它解决了一个非常实际的问题——深层网络的梯度消失。
当你堆 6 层 Encoder 加 6 层 Decoder,再每层里头两三个子模块……反向传播时梯度要穿过一长串变换。每过一层都被乘上一个 Jacobian,乘着乘着就变成接近 0 的小数了。模型根本学不动深层的参数。
残差连接相当于开了一条”高速公路”,梯度可以直接从输出跳回输入,不被中间层稀释。
还有个直观的好处:模型至少不会比 identity mapping 更差。如果某一层学到的 Sublayer(x) 是 0,那输出就等于输入,至少不退化。
Layer Normalization:为啥不用 Batch Norm?
LayerNorm 是把”一个样本的所有特征”做归一化(减均值除标准差)。BatchNorm 则是把”一个 batch 内同一特征”做归一化。
Transformer 里为什么用 LN 不用 BN?两个原因:
- 序列长度不一致:NLP 任务里每个 batch 里的句子长度不一样,BN 的统计量会很不稳定。
- 不依赖 batch size:LN 对单个样本就能算,哪怕 batch size = 1 也能工作。这在推理阶段尤其重要。
Post-LN vs Pre-LN
原版论文用的是 Post-LN:先算 Sublayer,加上 $x$,再做 LayerNorm。
\[\operatorname{output} = \operatorname{LayerNorm}(x + \operatorname{Sublayer}(x))\]但后来人们发现这玩意儿训练不太稳定,需要小心翼翼地 warmup。于是有了 Pre-LN:先 LN,再算 Sublayer,再加 $x$。
\[\operatorname{output} = x + \operatorname{Sublayer}(\operatorname{LayerNorm}(x))\]GPT 系列、现在大多数 LLM 都用 Pre-LN,训练更稳,可以用更大的学习率。这是后话,但值得知道。
八、前馈网络(FFN):给 Attention 加一点非线性
每个 Encoder/Decoder 层在 Attention 之后还有一个 FFN:
\[\operatorname{FFN}(x) = \max(0, xW_1 + b_1)W_2 + b_2\]就是两层全连接,中间夹个 ReLU。第一层把 $d_{model}=512$ 升到 $d_{ff}=2048$,第二层再降回 512。论文设定 $d_{ff} = 4 \cdot d_{model}$,这个 4 倍关系后来基本成了惯例。
这个 FFN 是 position-wise 的——也就是对序列里每个位置独立地应用同一个变换。完全等价于一个 kernel size = 1 的卷积。位置之间没有交互,那是 Attention 的活儿。
为啥需要它?因为 Attention 本质上是个加权求和——虽然 softmax 是非线性的,但那只是用来算权重的,对 $V$ 的操作是线性的。如果只有 Attention 没有 FFN,整个 Encoder 就是一堆线性变换堆叠(再加 LN),表达能力上限有限。FFN 的作用就是塞点真正的非线性进去。
有意思的是,后来人们做参数统计发现:Transformer 的参数大头其实在 FFN 上(一层 FFN 是 $512 \times 2048 + 2048 \times 512 \approx 2M$ 参数,而一层 Multi-Head Attention 才 $4 \times 512 \times 512 \approx 1M$)。从某种角度说,Attention 负责”在哪儿取信息”,FFN 负责”取到信息后怎么消化”。
九、完整流程走一遍:从 “I love you” 到 “我爱你”
零件都看完了,把它们装起来跑一遍。
Encoder 侧
输入是 “I love you”,三个词。
- Tokenize + Embedding:先把每个词变成 token id,再查 embedding 表,得到三个 512 维向量,拼成 $(3, 512)$ 的矩阵。
- 加位置编码:和对应位置的 PE 相加,输入还是 $(3, 512)$。
- 6 层 Encoder:每层依次走 Self-Attention → Add & Norm → FFN → Add & Norm。形状始终保持 $(3, 512)$。
- 输出 encoder_output:$(3, 512)$,这个东西要传给 Decoder 的每一层做 Cross-Attention。
整个 Encoder 是全并行的——三个词同时被处理,根本不需要等谁算完。
Decoder 侧
Decoder 复杂一些,每层有三个子模块。咱们假设训练阶段,目标输出是 “<bos> 我 爱 你”(<bos> 是起始符)。
子模块 1:Masked Self-Attention
Q、K、V 都来自 Decoder 自己的输入。但有个关键区别——加了 mask。
为什么要加 mask?训练时我们是把整个目标序列一次性喂进去的(teacher forcing),但生成”我”这个词的时候,模型只应该看到 <bos>,不能偷看”爱”和”你”。生成”爱”的时候,只能看到 <bos> 和”我”。生成”你”的时候,可以看到 <bos>、”我”、”爱”。
Mask 就是个上三角矩阵,对应”未来”位置的注意力分数被设为 $-\infty$,softmax 之后变成 0。这样每个位置只能”看到”自己和左边。
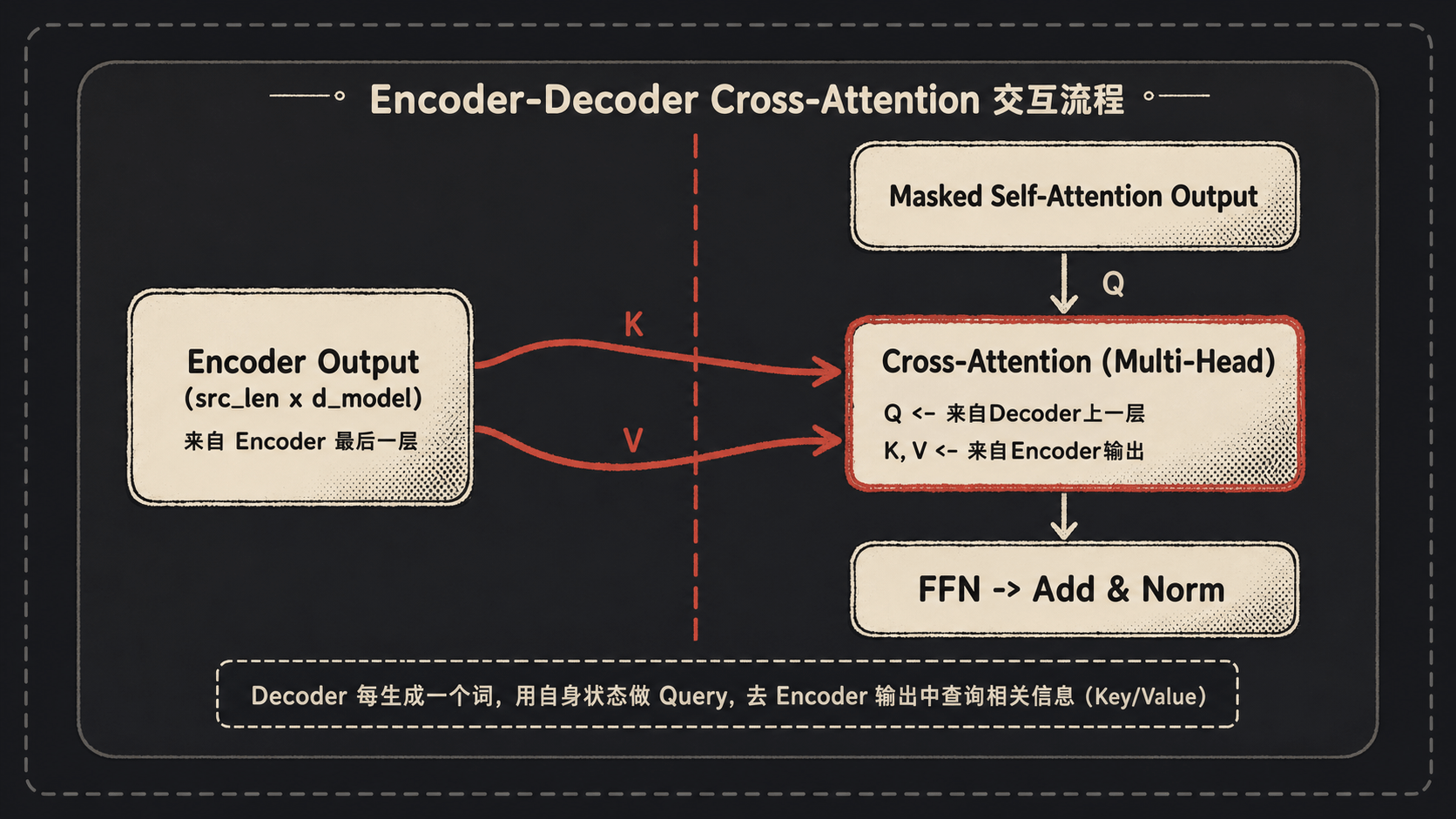
子模块 2:Cross-Attention
这个是 Encoder 和 Decoder 之间唯一的桥梁。它的 Q 来自 Decoder 上一个子模块的输出,K 和 V 来自 Encoder 的输出。
理解这一步是理解整个 Transformer 翻译流程的关键:Decoder 每生成一个目标词,都用自己当前的”已生成内容”作为 Query,去”询问”Encoder 输出的源句子,看看应该重点关注源句子的哪些位置。
生成”我”时,Cross-Attention 大概率会重点关注 “I”。 生成”爱”时,重点关注 “love”。 生成”你”时,重点关注 “you”。
(实际上每个位置都会关注多个位置,并不是严格一对一。)
子模块 3:FFN
和 Encoder 完全一样。
输出
Decoder 输出还是 $(3, 512)$。然后过一个 Linear $(512, \text{vocab_size})$,把每个位置映射到词表大小的向量。再 softmax,得到每个位置上”下一个词”的概率分布。挑概率最高的那个(贪心)或者用 beam search,就拿到了翻译结果。
训练 vs 推理
训练时用 teacher forcing:不管模型当前预测得对不对,下一步的输入永远用真实的目标词。这样训练才能并行,整个目标序列一次过。
推理时只能一个一个词地生成(autoregressive):先用 <bos> 生成第一个词,把第一个词拼上再生成第二个,以此类推。这个串行过程是没办法的,Transformer 推理的瓶颈也在这里。后来的 KV cache、speculative decoding 全是冲着这个问题来的。
十、总结:为什么 Transformer 改变了世界
把上面这些细节通通忘掉也没关系,记住下面这三句话就行:
第一,并行化。 训练时所有位置同时被计算,不受序列长度限制。RNN 是串行——序列长 100 就得算 100 步;Transformer 是并行——一个矩阵乘搞定。这是根本性的差异,不是量变是质变。GPU 时代的训练效率因此提升了一个数量级。
| 第二,长距离依赖直接打平。 在 $QK^\top$ 这张 $n \times n$ 的注意力矩阵里,位置 $i$ 和位置 $j$ 之间的关系一步就算出来了,不论 $i$ 和 $j$ 离多远。RNN 要传 $ | i-j | $ 步,CNN 要堆 $O(\log | i-j | )$ 层,Transformer 是 $O(1)$。 |
第三,通用性强到离谱。 Transformer 不依赖任何序列的先验结构。换句话说,它不假设”左边的词比右边的词更重要”或者”邻居比远处更重要”。把任何东西切成 token 喂进去都行。于是我们见证了:
- BERT:双向编码,理解任务一统江湖
- GPT:单向解码,生成任务一路狂奔
- ViT:把图像切成 16×16 的 patch 当 token,干翻 CNN
- Whisper:语音也行
- AlphaFold:连蛋白质结构都用 Transformer 来预测
- 现在的所有大模型:清一色 Transformer 架构
当然它也不是完美无瑕。Self-Attention 的复杂度是 $O(n^2)$——序列一长,显存爆炸算力告急。学术界这些年搞了一堆 Linear Attention、Sparse Attention、Flash Attention,就是想啃这块硬骨头。另外位置编码这事儿,本质上还是个”打补丁”,不如 RNN 天然有时序归纳偏置那么优雅。
但这都掩盖不了一个事实:2017 年那篇论文,是过去十年里最重要的一篇深度学习论文,没有之一。它没有终结深度学习的探索,但它重新定义了起点。
接下来要讲什么呢?Transformer 之后的故事——BERT 怎么用它做预训练、GPT 怎么把生成式做到极致、Vision Transformer 怎么把它带到视觉、再到 ChatGPT 引爆全球——那是另一长串故事了。
但起点在这儿。把这个起点理解透,剩下的都好说。
本文由 AgentPlanFlow 生成